- Kasutatud kaabel
- Kontrollimisjuhised
- K-CAN, PT-CAN, F-CAN ostsillograafia
- Takistuse mõõtmise järjekord sobivate takistustega K-CAN, PT-CAN ja F-CAN
- K-CAN
- PT-CAN, F-CAN
- Märkus!
- CAN-buss ei tööta
Seda juhendit kasutatakse kontrollimaks, kas CAN-i kõrge taseme signaal ja CAN-signaali madal tase on siiniühendusele õigesti edastatud.
Kasutatud kaabel
Multifunktsionaalne kaabel
Kontrollimisjuhised
- Pingetest (ostsilloskoop): Pinge kontrollimiseks peab aku olema ühendatud ja süüde sisse lülitatud.
- Takistuse mõõtmine: Takistuse mõõtmisel on vajalik, et mõõdetav objekt võetaks enne mõõtmist toidet. Selleks on aku lahti ühendatud. Oodake 3 minutit, kuni kõik süsteemi kondensaatorid tühjenevad.
CAN teavet
CAN-siin (kontrolleri piirkondlik võrk) on jadasiinisüsteem, millel on järgmised omadused:
- signaali levik toimub mõlemas suunas.
- Kõik sõnumid saavad kõik bussi tellijad. Iga bussi tellija otsustab, kas ta kasutab seda sõnumit,
- Täiendavad bussi tellijad lisatakse lihtsa paralleelühenduse abil.
- Bussisüsteem moodustab juhi abil süsteemi. Iga siini abonent võib olla draiver või ajam, sõltuvalt sellest, kas see on ühendatud saatja või vastuvõtjana.
- Ülekandemeediumina kasutatakse kahejuhtmelist ühendust. Traadi tähistused: CAN madal ja CAN kõrge.
- Reeglina saab iga bussi tellija suhelda bussi kaudu kõigi teiste bussi tellijatega. Andmevahetust bussis reguleeritakse juurdepääsu reeglitega. Peamine erinevus K-CAN andmesiini (kere CAN siini), PT-CAN siini (mootori ja jõuülekande CAN siini) ja F-CAN siini (šassii CAN siini) vahel on järgmine:
- K-CAN: andmeedastuskiirus umbes 100 kbps Võimalik on ühejuhtmeline.
- PT-CAN: andmeedastuskiirus umbes 500 kbps Ühejuhtmeline režiim pole võimalik.
- F-CAN: andmeedastuskiirus umbes 500 kbps Ühejuhtmeline režiim pole võimalik.
Juht: Juht on aktiivne suhtluspartner, kellelt suhtlusalgatus pärineb. Juht on ülimuslik ja kontrollib kommunikatsiooni. See saab saata bussisüsteemi kaudu sõnumeid passiivse bussi abonendile (täiturmehhanismile) ja soovi korral oma teateid vastu võtta.
Täiturmehhanism: täiturmehhanism on passiivne kommunikatsiooni liige. Ta saab käsu andmete vastuvõtmiseks ja edastamiseks.
Põhiseadmega süsteem: põhiseadmega süsteemis võivad kommunikatsioonis osalejad teatud ajahetkel võtta ülemuse või ajami rolli.
K-CAN, PT-CAN, F-CAN ostsillograafia
Suurema selguse saamiseks peate CAN bussi veatult töötama. Samal ajal ei ole vaja üksikuid bitte analüüsida ja peate lihtsalt veenduma, et CAN siin töötab. Ostsillalograafia näitab: "CAN-siin töötab ilmselgelt häireteta".
Pingeostsilloskoobiga mõõtmisel saavad CAN (või kõrge CAN-High) madala astme traat ja maapind ruudu laine signaali pingevahemikus:
K-CAN:
Madal CAN-i tase massi suhtes: U min = 1 V ja U max = 5 V
CAN-i kõrge tase massi suhtes: U min = 0 V ja U max = 4 V
Need väärtused on ligikaudsed ja võivad varieeruda sõltuvalt siini koormusest kuni 100 mV.
K-CAN-i mõõtmiseks ostsilloskoobi seaded:
CH1: sond 1, aste 2 B / div; DC DC2 ühendus: sond 2, aste 2 V / div; Alalisvooluühenduse aeg: 50 ms / div
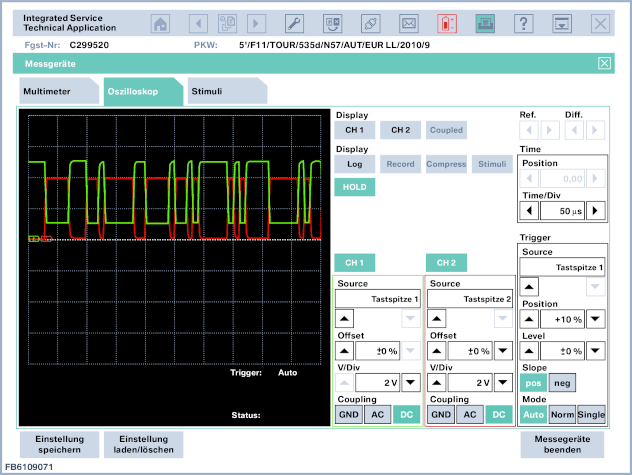
Joon. 1: K-CAN mõõtmine: CH1 madal CAN tase, CH2 kõrge CAN tase
Pingeostsilloskoobiga mõõtmisel saavad CAN (või kõrge CAN-High) madala astme traat ja maapind ruudu laine signaali pingevahemikus:
PT-CAN ja F-CAN
Madal CAN-i tase massi suhtes: U min = 1,5 V ja U max = 2,5 V
CAN kõrge tase massi suhtes: U min = 2,5 V ja U max = 3,5 V
Need väärtused on ligikaudsed ja võivad varieeruda sõltuvalt siini koormusest kuni 100 mV.
Ostsilloskoobi seaded PT-CAN (või F-CAN) mõõtmiseks:
CH1: sond 1, aste 1 B / div; DC DC2 ühendus: sond 2, aste 1 V / div; Alalisvooluühenduse aeg: 10 ms / div 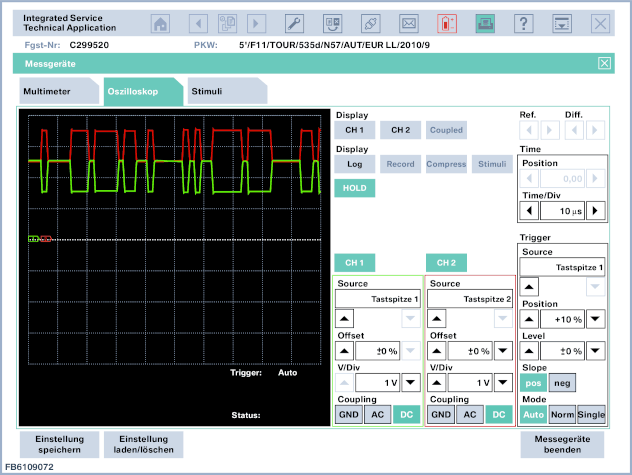
Joonis 2: PT-CAN mõõtmine: CH1 madal CAN, CH2 kõrge CAN
Takistuse mõõtmise järjekord sobivate takistustega K-CAN, PT-CAN ja F-CAN
Takistuse mõõtmise kontrollimise protsess:
- CAN siini toide peab olema tühistatud
- Muid mõõteseadmeid ei tohiks ühendada (mõõteseadmete paralleelne ühendamine)
- Mõõtmine toimub CAN madala ja CAN kõrge taseme juhtmete vahel.
- Tegelikud väärtused võivad erineda määratletud väärtustest mitme oomi võrra.
K-CAN
K-CAN siinil eraldi takistuse mõõtmist ei saa, kuna takistus varieerub sõltuvalt arvuti lülitusloogikast!
PT-CAN, F-CAN
Signaali peegeldumise vältimiseks laaditakse kaks CAN-siini abonenti (maksimaalse vahemaaga PT-CAN-võrgus) takistusega 120 oomi. Mõlemad koormustakistused on ühendatud paralleelselt ja moodustavad samaväärse takistuse 60 oomi. Kui toitepinge on lahti ühendatud, saab seda samaväärset takistust mõõta andmeliinide vahel. Lisaks saab individuaalselt takistusi mõõta.
Mõõtmisjuhised takistusega 60 oomi: eraldage hõlpsasti juurdepääsetav arvuti rehvist. Mõõtke madala ja kõrge CAN-juhtme vahelise pistiku takistust.
Märkus!
Kõigil autodel pole CAN-siini lõpptakistust. Sisseehitatud lõpptakistuse olemasolu ühendatud sõidukil saab kontrollida vastava juhtmestiku skeemi abil.
CAN-buss ei tööta
Kui K-CAN või PT-CAN andmesiin ei tööta, võib tekkida lühis või katki kõrge või madal CAN juhe. Või vigane eküü.
Rikke põhjuse lokaliseerimiseks on soovitatav toimida järgmiselt:
- Katkestage CAN-siini abonendid kordamööda, kuni leitakse tõrge, mis on rikke põhjustajaks (= ECU X).
- Kontrollige, kas arvuti X kaablitel pole lühist ega avatud voolu.
- Kui võimalik, kontrollige ECU X.
- Selline toimingute jada viib õnnestumiseni ainult siis, kui lühises on kontrollitav juhe arvutist CAN-siini. Kui CAN-siini juhtmel endal on lühis, peate kontrollima juhtmestikku.
Jätame endale õiguse teha trükivigu, semantilisi vigu ja tehnilisi muudatusi.